Soit
une variable aléatoire de loi uniforme sur
. Soit
une variable al\'eatoire de loi uniforme sur
. Donner un sens mathématique à la phrase précédente ; donner la loi de
.
On sait que, quand  , "la variable est uniforme sur
, "la variable est uniforme sur  ", ce qui veut dire que pour
", ce qui veut dire que pour  , on a
, on a  .
.
Les valeurs possibles de sont  , et pour calculer
, et pour calculer  (
( ) il faut d'abord distinguer les cas possibles pour la valeur de . On a
) il faut d'abord distinguer les cas possibles pour la valeur de . On a

Mais  (si
(si  ) et donc
) et donc
 .
.
On a alors 
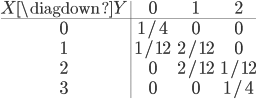
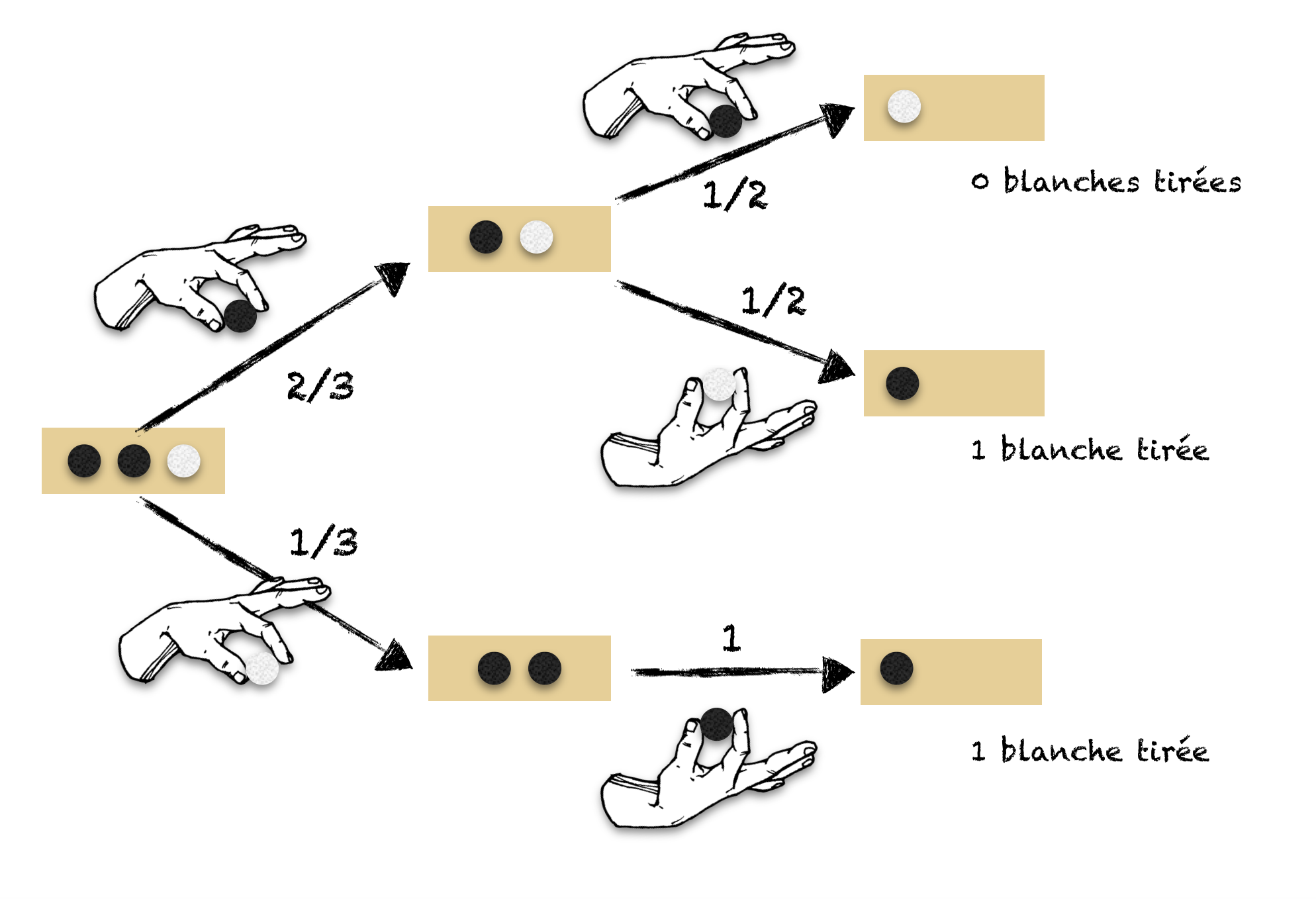
Soit
une variable aléatoire de loi uniforme à valeurs dans l'ensemble
et
une variable aléatoire telle que, conditionnellement à
. Explicitement, on a
et
. Donner la loi et l'espérance de
On remarque que, comme les valeurs possibles pour sont 0 et 1, la loi de sera forcément une loi de Bernoulli ! Il faut calculer son paramètre  , c'est-à-dire la proba
, c'est-à-dire la proba  . On a
. On a

L'espérance de est très simple à calculer, car on a 
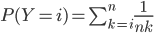
Soit
. On suppose une variable
.
On nous dit que est une variable aléatoire telle que  et que est une variable de Poisson de paramètre . Pour chaque
et que est une variable de Poisson de paramètre . Pour chaque  on a alors
on a alors































































































































![f:\mathbb{R}[x]\to\mathbb{R}](http://alessandracaraceni.altervista.org/MyWordpress/wp-content/plugins/latex/cache/tex_851901561ae8a833b2329cd39ccd30d8.gif)






![f:\mathbb{R}[x]\to\mathbb{R}[x]](http://alessandracaraceni.altervista.org/MyWordpress/wp-content/plugins/latex/cache/tex_145dc1ddf87117f11d547f8b90f72a21.gif)












![f:\{ax^3+bx^2+cx+d\mbox{ t.q. }a,b,c,d\in\mathbb{R}\}\to\mathbb{R}[x] : f(p(x))=p'(x)](http://alessandracaraceni.altervista.org/MyWordpress/wp-content/plugins/latex/cache/tex_857f266940d4571f253f99e320ff7927.gif)