


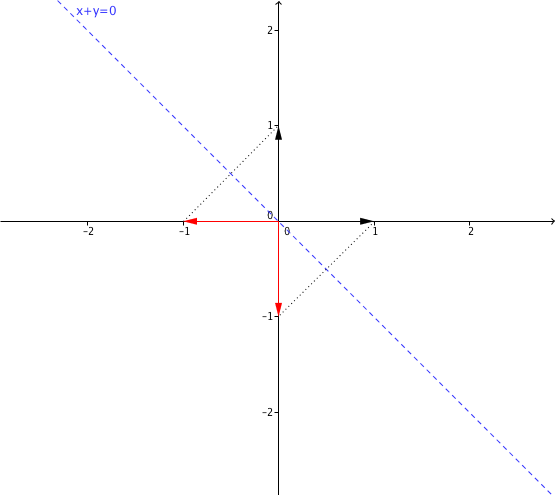
Problème 2. On considère la droite de
d'équation
; soit
l'application linéaire qui à chaque vecteur du plan associe son symétrique par rapport à cette droite.
- Déterminer la matrice
associée à l'application
par rapport à la base canonique de
Soit  la base canonique de . Les colonnes de la matrice sont les vecteurs
la base canonique de . Les colonnes de la matrice sont les vecteurs 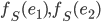 (exprimés dans la base canonique), donc on a simplement
(exprimés dans la base canonique), donc on a simplement
 .
.
- Montrer que la matrice
(c'est-à-dire le produit entre la matrice
On a bien  .
.
- On considère la matrice
; quel est le noyau de l'application linéaire
correspondante ? Quelle est son image ?
On a

L'application linéaire correspondante a comme image l'espace engendré par les colonnes de cette matrice, c'est-à-dire la droite engendrée par  (autrement dit, la droite
(autrement dit, la droite  ).
).
Le noyau de est l'ensemble des vecteurs  tels que
tels que  , c'est à dire tels que
, c'est à dire tels que  . Il s'agit donc de la droite par rapport à laquelle on avait pris les symétriques.
. Il s'agit donc de la droite par rapport à laquelle on avait pris les symétriques.
- Montrer que tout vecteur de
est orthogonale à tout vecteur de l'image de
Un vecteur de est de la forme  et un vecteur de l'image de de la forme
et un vecteur de l'image de de la forme  . Leur produit scalaire est
. Leur produit scalaire est  .
.
- Déterminer la matrice associée à
(au départ et à l'arrivée).
Les colonnes de la matrices sont les images des vecteurs donnés, exprimées en coordonnées par rapport à la base , que l'on va appeler  .
.
On a  ; les coordonnées de
; les coordonnées de  par rapport à la base sont
par rapport à la base sont  , donc la première colonne de la matrice sera
, donc la première colonne de la matrice sera  . On a
. On a  , qui a coordonnées
, qui a coordonnées  . La matrice cherchée est donc
. La matrice cherchée est donc  .
.
On sait que l'application linéaire
qui à chaque vecteur du plan associe son image par une rotation d'un angle
autour de l'origine est représentée par la matrice
(par rapport à la base canonique).
- Montrer que pour tout
le vecteur
a la même norme que le vecteur
.
Soit  , alors
, alors  ; la norme de est la racine carrée de
; la norme de est la racine carrée de  . Comme pour tout
. Comme pour tout  , la norme de est
, la norme de est  , c'est-à-dire la norme de .
, c'est-à-dire la norme de .
- Montrer que pour tout
.
Remarquez que ça revient à dire que symétriser par rapport à la droite , faire une rotation de et puis symétriser encore une fois donne le même résultat que faire seulement une rotation de dans le sens inverse, ce qui se voit bien géométriquement.
On peut aussi faire le calcul: on a

 .
.
- Montrer que pour tout
.
On a montré que , donc  .
.
La dernière égalité est claire du point de vue des applications linéaire correspondantes, qui sont l'une l'inverse de l'autre, mais peut aussi être montrée en faisant les calcul du produit matriciel.